If you've been to ERDAS Labs then you probably know that we are developing a new automatic terrain extraction solution. One of the unique things about the project is that it has given us the opportunity to think carefully about how we persist terrain data, and last week I had a chance to discuss this at the ISPRS Workshop in Hannover, Germany. I don't have a recording of the presentation, but here are some of the details:
1) Digital imagery is achieving increasingly high resolutions. We are now at a stage where airborne sensors can achieve higher than 5 centimeter pixel resolution.
 5cm Resolution ADS80 Imagery
5cm Resolution ADS80 Imagery
2) Many softcopy auto-correlation systems (XYZ terrain point matching system) were initially developed upwards of a decade ago, and were not designed to take advantage of high resolution sensors. Our own
LPS ATE module was originally released in 2001 as "OrthoBase Pro" (
timeline here). One of the features of some more modern systems is the ability to attempt correlation on every pixel - which can yield a very large volume of data.
 117 Million Auto-Correlated Terrain Points
117 Million Auto-Correlated Terrain Points
 Detailed View: Terrain Points on Individual Boats
Detailed View: Terrain Points on Individual Boats
3) TINs and Grids, the traditional formats for persisting terrain data in softcopy photogrammetry and GIS, may not be optimal for high resolution terrain data: hundreds of millions of points at a high density. Both have pro's and cons, which Gene Roe has
outlined here. Grids can be redundant (particularly for flat regions) and while TINs are very flexible in this regard, they have no standard format. Each vendor has their own implementation, making data translation and transportability a challenge - not to mention long-term storage.
4) The LAS format, while designed for use with LIDAR sensors, may be a viable alternative to TINs and Grids for autocorrelated terrain data. Why? There are a few different reasons:
- LAS is an ASPRS-administered standard and has a high adoption rate among geospatial software vendors.
- The LAS 1.2 specification supports attribution, for example the ability to encode an RGB value for each terrain point. While it isn't commonly used within the LIDAR community, it is very useful for auto-correlated terrain. This allows RGB-encoded terrain to be used for applications such as visualization. Capabilities such as this are not possible with the traditional TIN/Grid approach.
- When correlating on every image pixel, terrain data can be very dense. A compelling research area involves applying LIDAR classification and filtering techniques to autocorrelated terrain data.
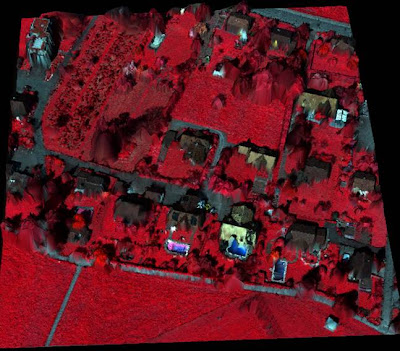 Point Cloud with Color Attributes (CIR, Red, Green: ADS80 Imagery)
Point Cloud with Color Attributes (CIR, Red, Green: ADS80 Imagery) Detailed View: Point Cloud with Color Attributes (CIR, Red, Green: ADS80 Imagery)
Detailed View: Point Cloud with Color Attributes (CIR, Red, Green: ADS80 Imagery)The images above show color attribute encoding for an LAS 1.2 point cloud that was processed from stereo ADS80 imagery. The bottom image is a zoomed in perspective view showing a lot of detail: solar panels on the roof, cars, and a feeling of depth in the empty pool. These images show the point cloud rendered as a TIN within the
FugroViewer. As you can see, the terrain representation is quite different from a traditional TIN or grid.
 The 2009 program contractors include a group of commercial mapping firms that are all well-known in the North American mapping industry: 3001, Aerial Services, the North West Group, Photo Science, Sanborn and Surdex. It is interesting to note that the cameras used will be a mix of large-format frame and pushbroom sensors. 3001 has both a Leica Geosystems ADS40 (pushbroom) as well as an Intergraph DMC (frame), and I'm not sure which will be used for NAIP acquisition. Aerial Services and the North West Group operate Leica ADS sensors. Photo Science and Surdex operate DMCs while Sanborn operates a Microsoft Ultra Cam (frame). The photogrammetric processing workflows for frame and pushbroom sensors are quite different, with pushbroom sensors capturing long strips of imagery in a "pixel carpet" versus the traditional frame approach. However, it is good to see a mix of technology in use.
The 2009 program contractors include a group of commercial mapping firms that are all well-known in the North American mapping industry: 3001, Aerial Services, the North West Group, Photo Science, Sanborn and Surdex. It is interesting to note that the cameras used will be a mix of large-format frame and pushbroom sensors. 3001 has both a Leica Geosystems ADS40 (pushbroom) as well as an Intergraph DMC (frame), and I'm not sure which will be used for NAIP acquisition. Aerial Services and the North West Group operate Leica ADS sensors. Photo Science and Surdex operate DMCs while Sanborn operates a Microsoft Ultra Cam (frame). The photogrammetric processing workflows for frame and pushbroom sensors are quite different, with pushbroom sensors capturing long strips of imagery in a "pixel carpet" versus the traditional frame approach. However, it is good to see a mix of technology in use.




